1.ĘŪŠĆąįš`▓ŅĄ─«a(ch©Żn)╔·
ė╔ė┌£uĮų┴„┴┐ėŗ(j©¼)é„ĖąŲ„╦∙£y(c©©)Ą─▓ó▓╗╩ŪŲĮŠ∙┴„╦┘,Č°╩Ūõ÷£u░l(f©Ī)╔·¾wā╔é╚(c©©)Ą─┴„╦┘ĪŻī”(du©¼)ė┌═─┴„ĀŅæB(t©żi),▓╗═¼Ą─└ūųZöĄ(sh©┤)Ž┬,┴„╦┘Ęų▓╝ęÄ(gu©®)┬╔╩Ū▓╗═¼Ą─,╝┤▓╗═¼Ą─┴„╦┘Ž┬Š▀ėą▓╗═¼Ą─┴„╦┘Ęų▓╝,▀M(j©¼n)Č°šf(shu©Ł)├„┴╦£uĮų┴„┴┐é„ĖąŲ„Öz£y(c©©)ĄĮĄ─ų„ę¬Ę┤ė│õ÷£u░l(f©Ī)╔·¾wā╔é╚(c©©)Ą─┴„╦┘,┼c╣▄Ą└ŲĮŠ∙┴„╦┘Ą─ĻP(gu©Īn)ŽĄ▓╗╩Ū╬©ę╗┤_Č©Ą─ĪŻ▀@šf(shu©Ł)├„£uĮų┴„┴┐é„ĖąŲ„Ą─ĘŪŠĆąįš`▓Ņ╩ŪŲõÖz£y(c©©)ÖC(j©®)└Ē╦∙øQČ©Ą─ĪŻį┌īŹ(sh©¬)ļH╩╣ė├Ģr(sh©¬),Ž╚└L│÷é„ĖąŲ„Ą─āx▒Ē│ŻöĄ(sh©┤)┼c┴„¾w┴„╦┘Ą─įć“×(y©żn)Ū·ŠĆ,ō■(j©┤)┤╦Ą├ĄĮ▓╗═¼┴„╦┘Č╬Ą─īŹ(sh©¬)ļHāx▒Ē│ŻöĄ(sh©┤)ĪŻ▒Š╬─æ¬(y©®ng)ė├MCS-51å╬Ų¼ÖC(j©®)ŽĄ┴ąĄ─89C51īóįć“×(y©żn)Ū·ŠĆ╩┬Ž╚╣╠╗»ė┌┴„┴┐ėŗ(j©¼)Ą─EPROMųą,ė├æ¶ĮY(ji©”)║Ž¼F(xi©żn)ł÷(ch©Żng)Š▀¾w╣żū„Ūķør═©▀^(gu©░)µI▒P▌ö╚╦ŲĮŠ∙āx▒Ē│ŻöĄ(sh©┤)KpĄ─ųĄ(Kp=(Kmax+Kmin)/2),īŹ(sh©¬)¼F(xi©żn)┴╦£uĮųé„ĖąŲ„Ą─ĘŪŠĆąįą▐š²ĪŻ
2.āx▒Ē│ŻöĄ(sh©┤)┼c┴„¾w┴„╦┘Ą─ĻP(gu©Īn)ŽĄ╝░ĘųČ╬ča(b©│)āö
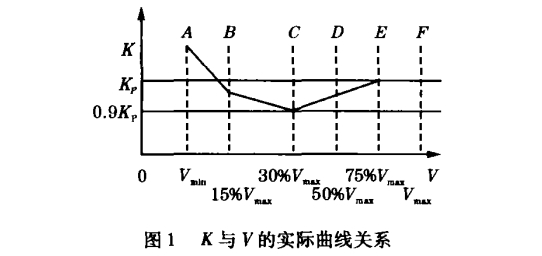
╬ęéāų¬Ą└£uĮų┴„┴┐ėŗ(j©¼)Ņl┬╩┼c┴„┴┐│╔š²▒╚,└Ēšō╔Žųv,£uĮų┴„┴┐ėŗ(j©¼)▌ö│÷Ņl┬╩┼c┴„╦┘│╔š²▒╚,ę▓Š═╩Ūšf(shu©Ł)āx▒Ē│ŻöĄ(sh©┤)║ŃČ©ĪŻīŹ(sh©¬)ļH╔Ž,ė╔ė┌┴„┴┐ėŗ(j©¼)▒Š╔ĒĄ─ę“╦žī¦(d©Żo)ų┬ā╔š▀ų«ķg┤µį┌ę╗Č©│╠Č╚Ą─ĘŪŠĆąįš`▓ŅĪŻĶb┤╦,╬ęéāū÷│÷┴╦ę╗Ślāx▒Ē│ŻöĄ(sh©┤)┼c┴„╦┘Ą─īŹ(sh©¬)“×(y©żn)ĻP(gu©Īn)ŽĄŪ·ŠĆ,╚ńłD1╦∙╩ŠĪŻłDųąĖ„³c(di©Żn)ū°ś╦(bi©Īo)Ęųäe×ķA(Vmin,1.0049Kp),
B(15%Vmax,0.997Kp),C(30%Vmax0.992853Kp),D(50%Vmax,0.94883Kp),E(75%Vmax,Kp),F(Vmax,Kp)ĪŻ
ßśī”(du©¼)▀@ĘNš`▓ŅęÄ(gu©®)┬╔,╬ęéā▓╔╚ĪĘųČ╬ča(b©│)āö?sh©┤)─ĘĮ╩Į▀M(j©¼n)ąąš`▓Ņą▐š²ĪŻė╔łD1┐╔ęį┐┤│÷,ļSų°┴„╦┘Ą─ĮĄĄ═Ż¼Ū·ŠĆŲ½ļxŲĮŠ∙ųĄįĮ┤¾,ī”(du©¼)┤╦╬ęéā▓╔ė├Ą─ĘĮĘ©┐╔ęį▀_(d©ó)ĄĮā╔éĆ(g©©)─┐Ą─:
(1)¤o(w©▓)šōŲ½▓ŅųĄČÓ┤¾,ų╗ę¬╦³ėąęÄ(gu©®)┬╔┐╔čŁ,Š═┐╔ča(b©│)āöą▐š²,▀Ć┐╔ęį░č┴„┴┐Ą─Ž┬Ž▐╝┤Vminį┌ū°ś╦(bi©Īo)╔ŽŽ“ū¾ęŲäė(d©░ng),╝┤öU(ku©░)┤¾é„ĖąŲ„Ą─┴┐│╠ĪŻ
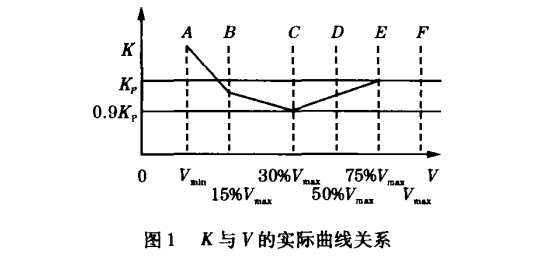
(2)Ė∙ō■(j©┤)Š½Č╚ę¬Ū¾║Ž└ĒäØĘųģ^(q©▒)ķgŻ¼į┌š`▓Ņ┤¾Ą─Ą═┴„╦┘ģ^(q©▒)ķgŠĆČ╬╚Ī├▄ę╗ą®,į┌š`▓ŅąĪĄ─Ė▀┴„╦┘ģ^(q©▒)ķg┐╔▀m«ö(d©Īng)īóģ^(q©▒)ķgĘ┼īÆĪŻ
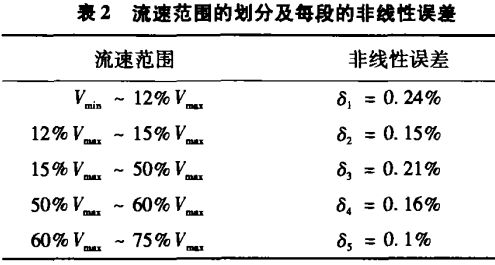
×ķ┴╦ØMūŃą▐š²║¾ĘŪŠĆąįš`▓Ņį┌0.3%ęįŽ┬Ą─ę¬Ū¾Ż¼╬ęéāĖ∙ō■(j©┤)└ĒšōĘų╬÷║═Ū·ŠĆęÄ(gu©®)┬╔,Ęųäeį┌12%VmaxĪó60%Vmax╠Äį÷╝ėā╔³c(di©Żn)(ęŖ(ji©żn)łD2),ū°ś╦(bi©Īo)Ęųäe×ķG(12%Vmax,Kp),H(60%Vmax,0.998Kp)ĪŻ└Ēė╔:ó┘Vmin/Vmax=8%~9%;ó┌DEŪ·ŠĆķg¤o(w©▓)╣š³c(di©Żn)ŪęŽ┬░╝;ó█ABŪ·ŠĆķg¤o(w©▓)╣š³c(di©Żn)ŪęŽ┬░╝ĪŻ▀@śėŻ¼░čš¹éĆ(g©©)┴„╦┘ĘČć·Ęų│╔┴╦┴∙Č╬,╚ń▒Ē1ĪŻ▀@śė╠Ä└Ē║¾,┐╔ą▐š²ĘŪŠĆąįš`▓Ņį┌0.3%ęįŽ┬ĪŻ
3.ča(b©│)āö║¾ĘŪŠĆąįš`▓Ņėŗ(j©¼)╦Ń╝░“×(y©żn)ūC
▒Ē2×ķča(b©│)āö║¾Ė„Č╬āx▒Ē│ŻöĄ(sh©┤)Ą─ĘŪŠĆąįš`▓Ņėŗ(j©¼)╦ŃųĄĪŻ
Ž┬├µė├─│ÅS╔·«a(ch©Żn)┐┌ÅĮ×ķDN80Ą─£uĮų┴„┴┐ėŗ(j©¼)×ķ└²“×(y©żn)ūCča(b©│)āöą¦╣¹ĪŻ
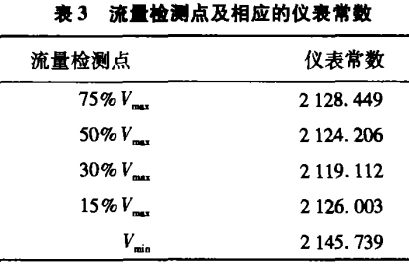
▒Ē3×ķįŁ╩╝Öz£y(c©©)öĄ(sh©┤)ō■(j©┤)ĪŻ
ŲĮŠ∙āx▒Ē│ŻöĄ(sh©┤):
Kp=(Kmax+Kmin)/2=2132.4305
ĘŪŠĆąįš`▓Ņ:
δ=(Kmax-Kmin)/(Kmax+Kmin)x100%=0.62%
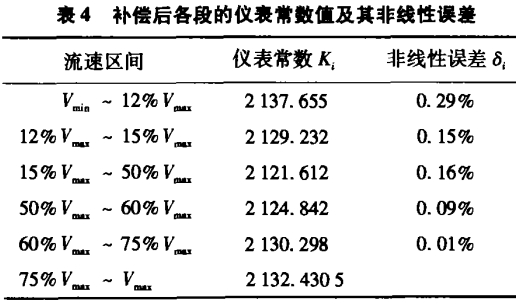
▒Ē4×ķča(b©│)āö║¾Ą─Ė„Č╬āx▒Ē│ŻöĄ(sh©┤)ęį╝░ĘŪŠĆąįš`▓Ņėŗ(j©¼)╦ŃųĄĪŻė╔┤╦┐╔ęŖ(ji©żn),ča(b©│)āö║¾Š½Č╚Ą├ĄĮ┴╦╠ßĖ▀ĪŻ
4.ėŗ(j©¼)╦Ń┴„┴┐
╦▓Ģr(sh©¬)┴„┴┐ėŗ(j©¼)╦Ń╣½╩Į:
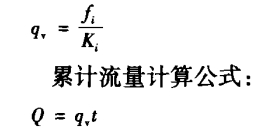
Q=qvt
╩Įųą:fiĪóKi-----Ą┌iŅl┬╩Č╬Ą─õ÷£uĘųļxŅl┬╩║═ŽÓæ¬(y©®ng)Ą─āx▒Ē│ŻöĄ(sh©┤);t---└█ėŗ(j©¼)Ģr(sh©¬)ķgĪŻ
 |